
Node Design
Each node is built from an identical CPU core, and a customized main board which connects to any extra hardware components that it needs. The node CPU contains the Atmel ATmega88 microcontroller and CAN interface. The board design is explained below.
")
Currently completed nodes (Oct 2013)

Annotated version of previous photo
Node CPU
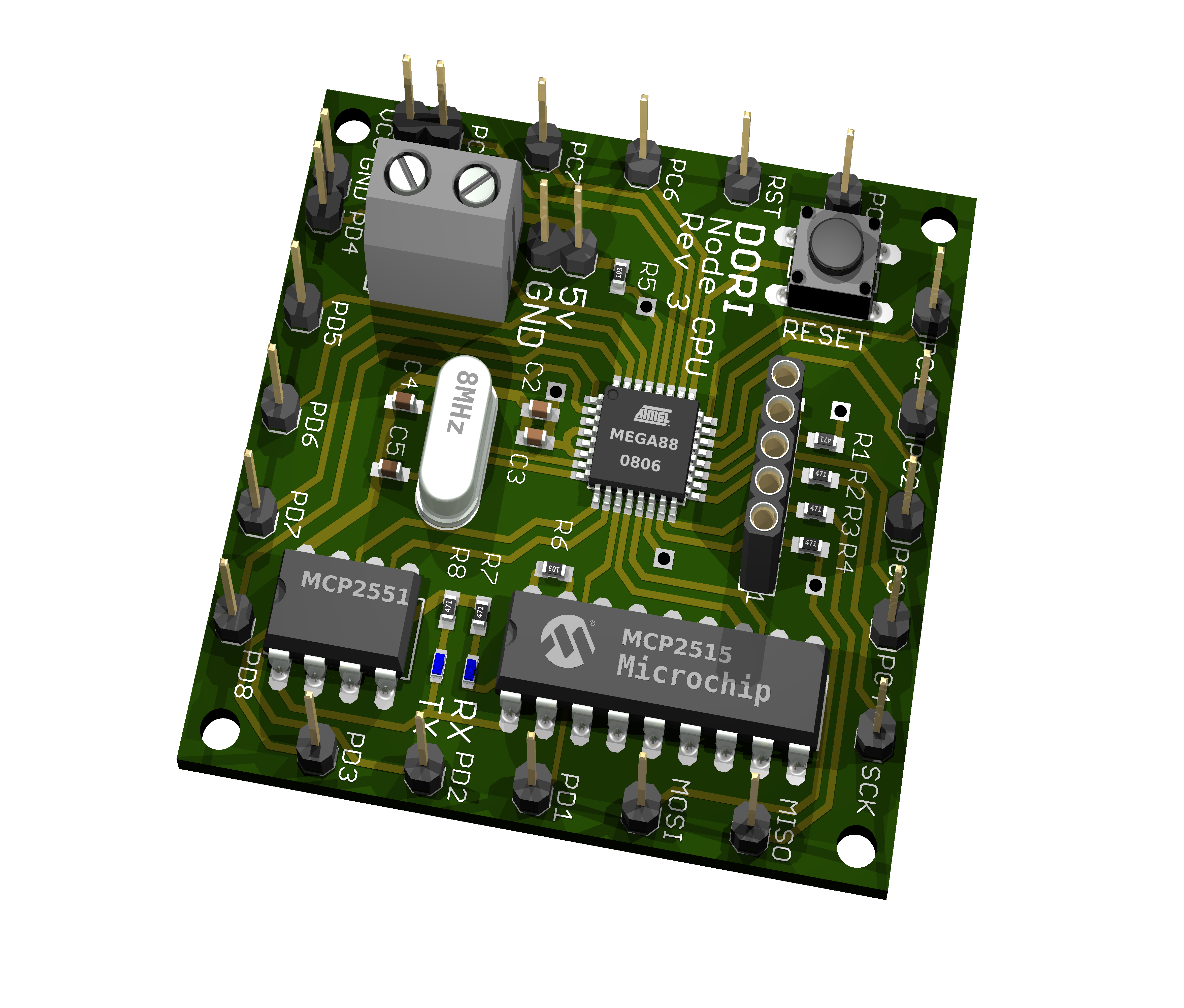
Node CPU board rev3 3D render, click here for pov-ray file
Modem A node (hardware complete)
This node provides our main communications link with DORI. It contains a Simcom SIM900 GSM modem for cellular communications.
Modem B node
The backup modem node can be used to communicate directly with DORI’s components if the main modem stops working. It uses a Nokia 3310 cell phone to transfer SMS messages.
Logger node (hardware complete)
The Logger node is responsible for logging all the sensor data that are transmitted on the CAN bus. It contains an SD card, connected over SPI.
Arm node (hardware complete)
The arm node is responsible for raising and lowering the arm, as well as sensor plate rotation and floodlight control.
* Arm control (2 relays)
* Linear actuator feedback (analog)
* Microswitch to detect lower limit
* Sensor plate spin control (L298N)
* Floodlight control (relay)
Drive node (hardware complete)
* Drive control (2 h-bridges)
* Ultrasonic (2 io)
9DOF node (hardware complete)
* nunchuk (i2c)
* compass (i2c)
* gyro (i2c)
* GPS (uart)
Enviro node (hardware complete)
* Rainfall (1 io)
* Humidity (analog)
* Rain temperature (1wire)
* Air temperature (1wire)
* Windspeed (analog)
* Air Pressure (i2c)
* Lightning sensor (i2c)
Diagnostic node
* Battery voltage (analog)
* ACS712 current sensor (analog)
* Heat control pads (peltier, motorcycle grip heaters)
* Temperature x 9 (1wire)
Temp: motor1
Temp: motor2
Temp: linear actuator
Temp: stepper
Temp: Powershot
Temp: lidar
Temp: modema
Temp: modemb
Temp: battery
Imaging node
* Powershot (spi)
* LIDAR (3 io)
* PIR motion (1 io)
Sniffer node (Hardware complete)
The sniffer node allows us to send and receive raw packets on DORI’s internal CAN network.